MODERN DETECTION METHODS
AN/SQS-504 VARIABLE DEPTH SONAR
MODERN DETECTION METHODS
AN/SQS-504 VARIABLE DEPTH SONAR
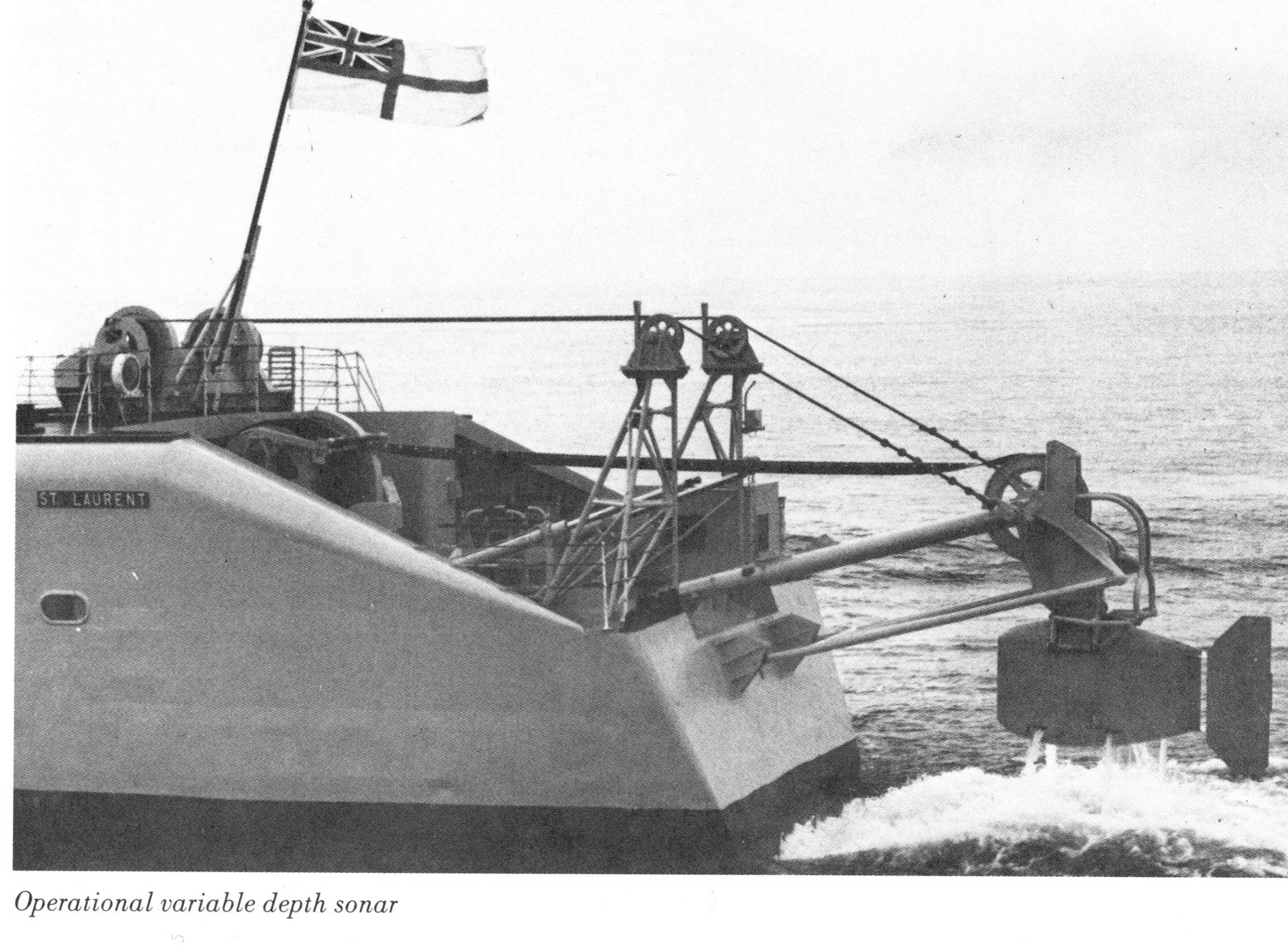
In naval circles, the RCN is recognized as having one of the most advanced Anti-Submarine forces in the world. One of the technical innovations that contributed to this merit was variable depth sonar (VDS) that first saw service in the early 1960's. Since thermal stratification of water will bend a sound beam and allow a submarine to escape detection, why not detach the transducer from the hull and tow it at varying depths? This is the basic concept of VDS.A sonar unit containing the transducer was lowered over the stern of the ship by a gallows-type boom mounted on the transom and a large 'A' frame mounted on the quarter deck. When not in use, the unit was stored in a carriage and was secured to the quarter deck. The sonar unit is raised and lowered by a cable that also carried the electrical leads to the transducer and training controls. This cable was equipped with small, closely spaced, free pivoting elliptical fins that provided a streamlined shape to the cable and reduced acoustical noise. By design, the free flooding sonar unit was towed almost directly under the stern of the ship. By lengthening and shorting the towing cable, the sonar operator could probe different thermal layers in order to detect the target. The British tried to design their own version of VDS but finally gave up and procured the Canadian system in 1960. They called it Type 199.The late Dr. H. W. Smith, former Research Director of the Canadian Naval Technical History Association offers some information on VDS.
"The VDS fitting on HMCS CRUSADER (mid 1955 to Jan 1960) was called CAST1. It was the experimental forerunner of the first operational VDS, namely the AN/SQS-504, which was subsequently evaluated in HMCS CRESCENT 1961-63, and fitted in seven improved ST LAURENT's, HMC ANNAPOLIS and NIPIGON (1963-65) .
 |
| The CAST/IX VDS was the forerunnrer to type AN/SQS-504. (Fron Knots, Volts and Decibels) |
 |
| Here,, CAST/IX is being trialed aboard HMCS Crusader. (Fron Knots, Volts and Decibels) |
Internally, the SQS- 504 consisted of a searchlight sonar, with a transducer mechanically trainable all round and looking horizontally. Horizontal beamwidth was 20° while the vertical beamwidth about 13°. These were the specifications when operating at 11 kHz. Beamwidths varied slightly at frequencies of 9.5, 12.5, 14 kHz which were the other available transducer frequencies.The towed body tracked with good stability behind the ship with limited roll, pitch and yaw. In a turn, the body would develop a small roll and yaw compared to the ship. However, the transducer was stabilized in yaw by a gyro-stabilized magnetic compass in the body, so that transducer direction was corrected for yaw. Bearing accuracy good enough for helicopter direction. Since the transducer was trainable there was no problem in seeing aft targets. In fact, the performance looking aft was better than that of looking forward because the effect of the ship's propeller noise was less.
In the four improved RESTIGOUCHE class and the four DDH 280 class, the VDS which was fitted was the later AN/SQS-505, evaluated in TERRA NOVA 1966. This VDS (an updated model is still fitted in the IROQUOIS class) had a fixed cylindrical transducer array (7.2 kHz), with electronics designed to give all-round coverage on every ping.
The HALIFAX class ships do not have VDS. Their SQS-510 hull-mounted sonar (derived from the 505, but with extensive use of digital signal processing) may have some limited below-the-layer capability. A towed passive sonar array is also fitted.
VDS is generally not very useful in tropical (30° N to 25° S approximately) waters where a high surface temperature usually results in a strong negative temperature gradient (>5°/100ft) extending to the surface thus producing disappointing results for *any* active sonar. This is one reason why the RN and USN, with their worldwide outlook, were less enthusiastic about it than we Canadians, fixed as we were on high-latitude North Atlantic and Canadian inshore operations. VDS was abandoned by the RN in the early 1980s since their excellent helicopter based, active-sonar provided a better tactical answer to below-layer targets when it was important".
When asked about the maximum range that could be expected from modern sonar, Dr. Smith explained "Sonar range depends so much on propagation conditions, sea state and the background noise level of the ship in which it's fitted so generalizations are dangerous. SQS-505 (circa 1968) in an improved RESTIGOUCHE, sea state low (1-2), well-developed surface duct (isothermal to 300-400 ft, -2 deg/100 ft below that) has been reported in the open literature as getting ranges on a target up to 27500 yards. However, the system was optimized for 12000 yards which is a more realistic operational range. Below the "layer", detecting targets at 3000 to 4000 yards might proved difficult". Dr. Smith was asked some other questions which appear in italics:
Q - If a diver was in the vicinity of an sonar dome, and someone inadvertently placed the sonar in operation, would the diver be in any danger or is the sound energy sufficiently attenuated by the water?
A - "Yes the diver would be in danger . SQS source level at 1 yd from transducer is 135 dB. But the sound pressure in water is about 60 times higher than in air for the same dB level (denser medium), so the effective level at 100 yd is 133 dB, which is enough to damage an unprotected ear. An SQS-505 pinging in Halifax harbour could be heard (loudly) in a submarine alongside and generated lots of complaints. Some ships, if divers were working below, word was frequently passed over the public address not to operate the engines or turn on the fathometer. Precautions were definitely taken.".
Q - When a sonar is "pinging", can it can be heard throughout the ship and to what extent?
A -"When I was doing trials on the British Type 177 in 1954, you certainly heard the transmission go out, but this was mainly because the ship's supply 'coughed' with the huge drain of a 1-sec 40 kW pulse. On the 505 analogy, you might hear the actual pulse below the water line if you had young 7.5 kHz ears".
Q - In today's navies, is the search capability identical between those sonars fitted on surface ships and those in submarines ?
A - No. If a submarine has any active sonar at all, it's a short-range minefinder. But submarine passive sonars have search ranges extending to the second and possibly third convergence zone.
Brooks A Rowlett provides an explanation of the convergence zone. "One of the big discoveries post WWII was a much better understanding of the acoustic and refractive properties of the ocean. The 'layer', where the temperature changed from the surface temperature curve to the deep-water temperature curve became well known in WWII, where after a certain angle, the acoustic energy transmitted would reflect from the layer so that a submarine, could in effect, hide 'under the layer'. Variable -depth sonar was invented to get around this problem. In essence, the sonar head could be put on a cable and lowered until it was under the layer to be able to detect submarines so concealed. Sonobuoys can have similar utility. However, for a steep enough angle, the energy does not reflect but continues through the layer. The increasing pressure and temperate in very deep water (>1000 fathoms) can then bend the sound back up. The sound path can form an approximate sinusoidal curve - near the surface at the ship, down to several thousand feet deep and then back up to 'near' the surface, within a thousand feet or so.
Some lower frequency active sonars are powerful enough in output, and sensitive enough in receiving, that they could detect a submarine at the point where the refracted sound waves are back near the surface. This phenomenon is called the 'convergence zone' in part because acoustic paths that have spread somewhat have converged back together.
The radius of the convergence zone depends on the water depth and temperature (and salinity plus more) - it gets closer in cold water and farther away in warm water. The usual quoted maximum practical convergence zone range is about 30 nautical miles! Or it might be as little as 15 miles in the Arctic Ocean. The width of the zone where such detection is possible is normally about 10 % of the radius of this zone.
However, the sonar is of course still getting 'direct path' returns, the same way the much higher frequency WWII sonars did. The kind of range one can get also depends heavily on the acoustic properties of the water - so much that the sonar operator speaks of 'the range of the day' instead of the 'normal effective range'. A good figure for this has been reported as 10,000-15,000 yards. In this context , one can note that the ASROC antisubmarine weapon on USN and some Canadian ships had a reported range of 5 to 6 nautical miles. Similarly, the SUBROC nuclear depth bomb aboard USN subs in the 1960's through 80's had a standoff range of about 30 nm. In other words they could attack an enemy at one convergence zone.
Passive sonar can do better. Some tactical towed arrays are reported as having a detection range of 3 convergence zones and the US SH-60B Seahawk, LAMPS Mk III system is reported as being designed to engage a submarine detected at the third convergence zone. Of course, with passive sonar, the operator doesn't know at first which zone the target is actually in!
Passive listening was put to good use during the Cuban missile crisis. Tom Fullerton explains. " During the Cuban Missile Crisis, either Newsweek or perhaps it was Time, showed a photo of a US Destroyer in the foreground and a surfaced Russian sub in the background. The caption was something like "May we help you?" Russian subs took great pains remain hidden, yet threaten. For a sub to be brought to the surface was a great embarrassment to the Russians, and a feather in the cap of the Americans.
Less than a year later, I found out a little secret while on a course at Key West's USN Sonar School in June, 1963. Someone had invented a noisemaker which was launched by a Hedgehog style launcher. After hitting the water, it would sink and if it made contact, would attach itself to the hull of the submarine with a very strong magnet. Once attached, a tubular shaped "clanger" would deploy. As the submarine sailed through the water, one end would bang continuously against the hull. The faster the sub travelled, the stronger and more frequent the banging. It was said at the time that the gadgets were being manufactured by Ford Motor Company at a cost of less than $2.00 each.
Ships could track these clanging noises with passive (listening) sonar and, from what I can remember, there was nothing the sub could do except , surface and remove the gadget while being completely visible".
 |
| This elementary sketch provided by Tom Fullerton shows the basic shape of the noisemaker. |
Going back to our active sonar, if you look down on the ocean surface, then the zone of detection (the "ensonified" area around the ship) forms a solid circle centered on the ship with a notch cut out behind the ship since the propellers and engines mask the sonar returns. Then further out, there will be an additional ring (also with the notch cut out aft) about 28.5 miles to 31.5 miles - the convergence zone where detection of a submarine is also possible.The kinds of sonars that have this range are apparently down in the 1.5-5 kHz range. As the operating frequency of the sonar increases more energy is absorbed by the water instead of being transmitted".
All detection platforms including Anti-Submarine Warfare (ASW) submarines, have shifted emphasis from active to passive sonars. While active sonars produce more accurate readings and are more effective in the phase preceding destruction, the later are more useful because of their longer range and silent mode of operation. Neither system is sufficient on it's own, so ASW units have to rely on both and augment the data with information obtained from other detection systems.
In the 1980's, there were important developments in passive towed array systems, tactical towed array systems (TACTAS) and surveillance towed array sensor systems (SURTASS). These evolved from early devices used by American nuclear submarines to locate shadowing submarines. In the case of TACTAS, submarines can be heard at distances of up to 160 km or more. What a contrast when compared to the 2000 yard range of World War II ASDIC! SURTASS has even longer ranges but requires links with satellites and shore facilities. Both systems are designed with a significant amount of computer technology. Their effectiveness varies with a number of factors, including the noise being made by the towing submarine, towing speed, the number of ships travelling in company and the level of background noise.
These systems cannot localise a target since that task must be left to other sensor systems such as variable depth sonar (VDS). VDS can explore water below the surface layers but its range and accuracy is limited. Hull mounted sonars can operate in both passive and active modes but their range is limited. They are however, extremely accurate in the active mode. Because of the long ranges at which submarines can detect a target, long range passive towed arrays are becoming essential items of equipment for surface warships.
In the case of aerial ASW, sonobuoys are a key detection device. Standard issue models have a detection range of several kilometres, but offer no directional information when used singly. Directional, variable depth, passive sonobuoys allow naval aircraft to detect their targets at distances between 8 and 16 km. Like passive towed arrays, they fail to give a precise indication of range. If range information is required, then active sonobuoys (whose range is 1.5 to 3 km) must be deployed.
Dunking sonars perform the same task for helicopters that variable depth sonars do for ships -- they allow them to reach below surface water layers. They are most effective in barrier searches but they can only be used at low speed. Their range is classified, but it probably does not exceed 3 to 4 km.
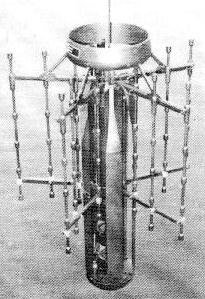 |
| A dunking sonar. (Photo courtesy of Computing Devices Canada) |
Magnetic anomaly detectors (MAD) are used by helicopters and fixed wing aircraft such as the CP140 Aurora to localize targets. Any large steel object such as a submarine will distort the lines of the earth's magnetic field directly around the area of that object. The MAD detects this distortion and locates the object. MAD is employed in the attack phase and has an effective range down to about 300 meters.Submarine detection is not limited to mobile platforms. Sound surveillance under the sea (SOSUS) is a field of hydrophones connected to shore stations by cable. Initially, this American system covered the Atlantic continental shelf along the coast of North America. Now it reaches far beyond the approaches to this continent. SOSUS has been in operation since the late 1940's and detects most submarines travelling at more than 8 knots.
Modern submarines, while submerged at shallow depths are able to communicate with ships and aircraft through a fin mounted radio antenna and when more deeply submerged, by means of floating a very low frequency antenna. Despite this capability, submarines can compromise their stealth factor and reveal their position if radio direction finding techniques are used by the ASW craft.
AN IMPRACTICAL COUNTERMEASURE
During the height of the Cold War, NATO proposed the dropping of floppy magnets on Russian subs in order to make them noisier and easier to hunt. The technique was very clever but training with it was too difficult. Select this link to read the complete story.
Commander S.C. Doucette of the Canadian Forces Naval Operations School in Halifax was kind enough to provide some specifications on the latest types of sonar in service with the RCN. Any information presented here is unclassified, of course.
AN/SQR-501
This is a low frequency, tactical, passive, towed array sonar system designed and built by the ASW Division, Computing Devices Company, Nepean Ontario. It has also been designed to be compatible with the United States Navy AN/SQR-19 towed array and is capable of detecting surface or sub-surface targets out to the second convergence zone and beyond. Signal processing is performed by the AN/UYS-501, a programmable, 64 bit, floating point digital processor, capable of sustaining a throughput of 320 million floating operations per second. For readers who understand leading edge sonar technology, the AN/UYS-501 can simultaneously process:* 43 beams of narrow band data.
* 43 beams of DEMON data.
* 43 beams for each of 4 verniers.
* 360 degree broadband data in 0.5 degree increments.
* 2 beams of audio data.
* Noise mean estimate data.In reference to tracking, the unit can track up to 120 operator initiated tracks in bearing and frequency. A high density digital recorder (HDDR) stores unprocessed acoustic data and systems parameters for post analysis, threat intelligence and training. A replay mode allows on-board playback of mission scenarios. Attached to the data management and distribution unit, is an uninterruptable power supply (UPS) which maintains power for up to thirty minutes. The video display for the system consists of a very high resolution monochrome monitor containing 1536 by 1152 pixels. Many users of Personal Computers would certainly envy having this level of resolution on their monitors!
This is a medium frequency, active sonar designed for use aboard vessels in either a hull mounted or a variable depth configuration and built by the Computing Devices Company. The heart of this system is the AN/UYS-501 digital signal processor that will also permit operation in passive mode. Some key specifications are:
| Pulse Types | CW or LPM (Linear Period Modulation) |
| Pulse Duration | 400 ms for CW and 320 ms for LPM |
| Frequencies | 3 selectable frequencies in the
2 to 8 kHz range |
| Transmit Modes | OMNI-DIRECTIONAL, Narrow - 10 degrees
Wide - 30 degrees |
| Range Scales | 2,000 to 60,000 yards in 6 selectable bands |
| Bearing Resolution | less than 1 degree. |
| Range Resolution | 160 yards on CW; 12.5 yards using LPM |
| Passive Bands | 2.2 to 8.6 kHz |
This is a digital processor built by Computing Devices Company for the processing of signals received from up to eight standard sonobuoys or a dunking sonar.
Great strides in technology have forever changed the way in which we view our Navy. During World War II, Canadians carried the image of the open, plume swept bridge of a corvette whose keel was laid down within six months, whose crew consisted of bankers, teachers, farm boys and crusty old fisherman none of whom had ever seen the sea prior to joining the Navy ninety days beforehand (except for the fisherman). With binoculars clamped to their keen eyes, and with their strong stomachs coping with the violent pitching of the tiny grey vessel, they sailed off to be hidden by the mists of the North Atlantic. It's not far from the truth. At the peak of strength in 1945, the Royal Canadian Navy had approximately four hundred ships in commission. Such scenes will be never be seen again. In today's world, the ship will have taken eight years to design, at least three years to build and will have cost the same as the annual budget of a good- sized Canadian city. Instead of the open bridge, there are compartments deep with the ship's gas-tight citadel, fed by recycled, filtered air. Instead of binoculars, there are cathode ray tubes displaying the computerized images provided by a half dozen or more sensor systems. The people operating the display terminals are military professionals with many years of schooling in electronics, mathematics, computer science and engineering. The ship will not sail off into the mists to be lost from view. Instead, through the use of satellites, and other technologies, the ship will be in constant communication with shore command and other vessels regardless of its position at sea. Besides its sophisticated detection capabilities, the ship will also become a target for hostile ships or aircraft.
Once a submarine is detected, there remains the problem of destroying it. Submarine technology has rendered the depth charge obsolescent. Even mortars capable of firing charges up to 1000 metres have diminished in usefulness since submarines can take evasive action between the time that the mortars are heard to fire and the moment their charges explode. New, rocket launched torpedoes are gradually replacing mortars in an effort to reduce this interval between firing and explosion. Torpedoes are still the prime anti-submarine weapon. The largest of these continue to be fired by submarine but lighter models can be launched by surface vessels, aircraft and helicopter. The American designed Mark 46 torpedo can rely on active or passive homing modes as it spirals downward in search of a target once it has been dropped with 1000 metres of its objective. Improvements were added to allow the torpedo to counter sound-absorbing coverings used on modern submarines. Rocket torpedo combinations fired by surface vessels can reach targets several kilometres away. Most submarine launched torpedoes are relatively slow with top speeds in the order of 50 knots. Many are wire guided because of the limited capacity of their acoustic homing sensors. Although cumbersome, wire guidance enhances accuracy over the 30 to 50 km distance that these weapons travel.By comparison, existing nuclear or conventional-capable submarine launched rockets (SUBROC's) and anti-submarine warfare standoff weapons (ASW-SOW's) which can be fired from submerged stations achieve greater speed as a large portion of their path is traversed in aerial mode. They do, however, tend to lose accuracy over their 35 km range because of the difficulty encountered in relaying targeting information to them while in flight. Even with their increased capabilities, ASW weapons used by surface ships are far outranked by, and are less accurate than, the weapons used by submarines against surface craft. It is for this very reason, that surface ASW vessels are forced to operate, most often, in company with fixed/rotary wing aircraft. Once a submarine is detected, aircraft can then rapidly bring their weapons within range. Virtually all modern ASW ships are designed to carry one or two helicopters.
Mines also present a significant threat to submarines as they are being designed to incorporate technologies from other systems. An example of this is the American Captor mine. When triggered, it will release an acoustic homing torpedo thus combining the power of the two most effective A/S weapons. They are usually seeded in deep water, well below the 20 to 35 km range of mine-hunting sonar. Besides being dangerous, mines are relatively cheap to build and present another dilemma. Briefly: What proportion of resources -- time, human, financial and other can be devoted to mine countermeasures?
By operating together, air, surface and sub-surface units do more than simply compensate for each other's weakness. They take on a strength greater than the sum of their parts. For a navy that is developing a weapons strategy, it would be unwise to simply focus on one individual system for ASW. It is always possible that new developments or conflicts of some unforeseen kind might render one or another of the weapons platforms permanently or temporarily ineffective.
To hear pinging from a real sonar, select this link. (168 kb wav file). What you are hearing consists of a transmission, followed by an echo after 3 seconds. This is repeated a second time. It therefore takes 1.5 seconds for the sound to reach the target. The returning echo after 3 seconds corresponds to a contact approximately 2,400 yards away (Calculation: The speed of sound in water is approximately 4,800 feet per second multiplied by 1.5 seconds = 7,200 feet or 2,400 yards). File courtesy of Keith Wilbur.
Credits and Contributors:1) Tom Fullerton <tomf(at)porchlight.ca>
2) "Knots, Volts and Decibels. An Informal History of the Naval Research Establishment 1940-1967 by John Longard.
Jan 5//26