 |
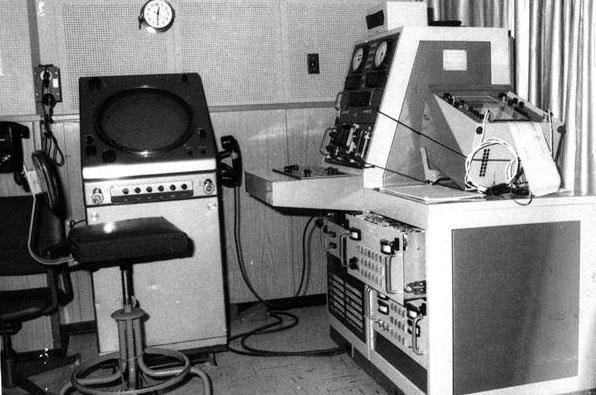
| Quadra 1968: AN/FPQ-10 radar. The Telecom branch of the Canadian Coast Guard gave it the designation of SP6504. Outside of the Coast Guard, it could not be recognized by that designator. (Photo by Bob Manning) |
|
| Quadra 1968: AN/FPQ-10 radar. The Telecom branch of the Canadian Coast Guard gave it the designation of SP6504. Outside of the Coast Guard, it could not be recognized by that designator. (Photo by Bob Manning) |
The Sperry tracking radar, AN/FPQ-10, has the following characteristics:Type: Monopulse, missile range instrumentation tracking radar.
Power: 1 megawatt peak. There were losses in the waveguide but were more than compensated by the +23 db (or so) gain of the antenna.
Frequency Low: 5,400 MHz
Frequency High: 5,900 MHz
Pulse Width: Selectable - 0.25 or 0.5 or 1µs
PRF: 160 or 640
Azimuth: 0 to 360 degrees
Elevation: -5 to +185 degrees
Vintage: mid 1960'sFrank Statham comments on the FPQ-10. "For 1965 technology it was quite impressive -- a small computer analyzed the roll, pitch and heading information from the ship and used that to stabilize the antenna dish. It would then calculate the speed, course and altitude of any target we acquired out to some 200 nm. The tracking system was so good, we could turn off the roll/pitch/heading information and the antenna would still track, although the target data would be useless".
 |
| The AN/FPQ-10 fitting aboard CCGS Vancouver circa 1971. The computer rack, not visible in the photo, was on the left and faced the console on the right.. (Photo by Dennis Engemoen) |
 |
This is an actual printout from the AN/FPQ-10
radar. Headings across the top are:
TIME: From start of balloon run
Click on image to enlarge. Once an object was tracked, there would be
a line printed every minute on a teletype machine with the above data.
.
|
When launching a balloon, the ship was always turned into the wind, or as close to it as possible depending on the sea state. If not done at time of launch, the balloon and the trailing radiosonde might have gotten tangled in the ship's superstructure or the long wire antennas. It always took a few minutes to locate the balloon and ensure it was fixed on the main antenna lobe, and not a side lobe. To help, the radar receiver could be desensitized when required, by moving a shutter in the receiver's waveguide by pressing a buttonOnce the operator was satisfied the radar was tracking properly, the "ACQ TRK" (Acquisition Track) button was pressed and the FPQ-10 electronics would take over leaving the operator to just monitor the remainder of the run. The computer acquired roll, pitch and heading info from the MK19 gyro. It also got ship's speed, antenna position data, whether the balloon was centered in the beam, balloon's range then processed it all together. That was then fed into the antenna servo system. The run would end when the balloon burst. When it burst, the balloon and its "package" would tumble thus producing a quickly changing amplitude on the 'A' scope, and a diminishing altitude. The computer would also look at the balloon data, and give it a "sanity" check. For instance: the target's speed hasn't increased by 100 mph within the 1 minute span. Data like that would be an example.
| For a more detailed look at the AN/FPQ-10 radar, please select this link. |
Credits and References:1) Bob Manning (now deceased)
2) Frank Statham <fstatham(at)gmail.com>
3) Dennis Engemoen <dhengemoen(at)shaw.ca
Back To Weather Ships Aug 16/25